Patas que caminan: varillajes de Klann y Jansen
Una rueda lo tiene fácil: gira y avanza. Una pata no. Una pata tiene que tocar el suelo, quedarse clavada en él mientras el cuerpo pasa por encima —de modo que retrocede respecto al cuerpo aunque no se mueva respecto al suelo—, manteniéndose a la misma altura para no botar, despegar, volar de vuelta y posarse de nuevo en el mismo punto del ciclo. Hacer eso con un motor que solo sabe girar parece exigir articulaciones controladas una a una, y durante un siglo se resolvió así. El varillaje de patas es la respuesta mecánica pura: una manivela que gira sin parar y una red de barras rígidas que traduce ese giro en una pisada. No hay sensores, no hay control, no hay más inteligencia que la que está congelada en las longitudes de las barras. Y ahí está la dificultad de imprimirlo: toda la marcha vive en unas cotas que el FDM tiende a corromper.
La curva del pie es todo el mecanismo
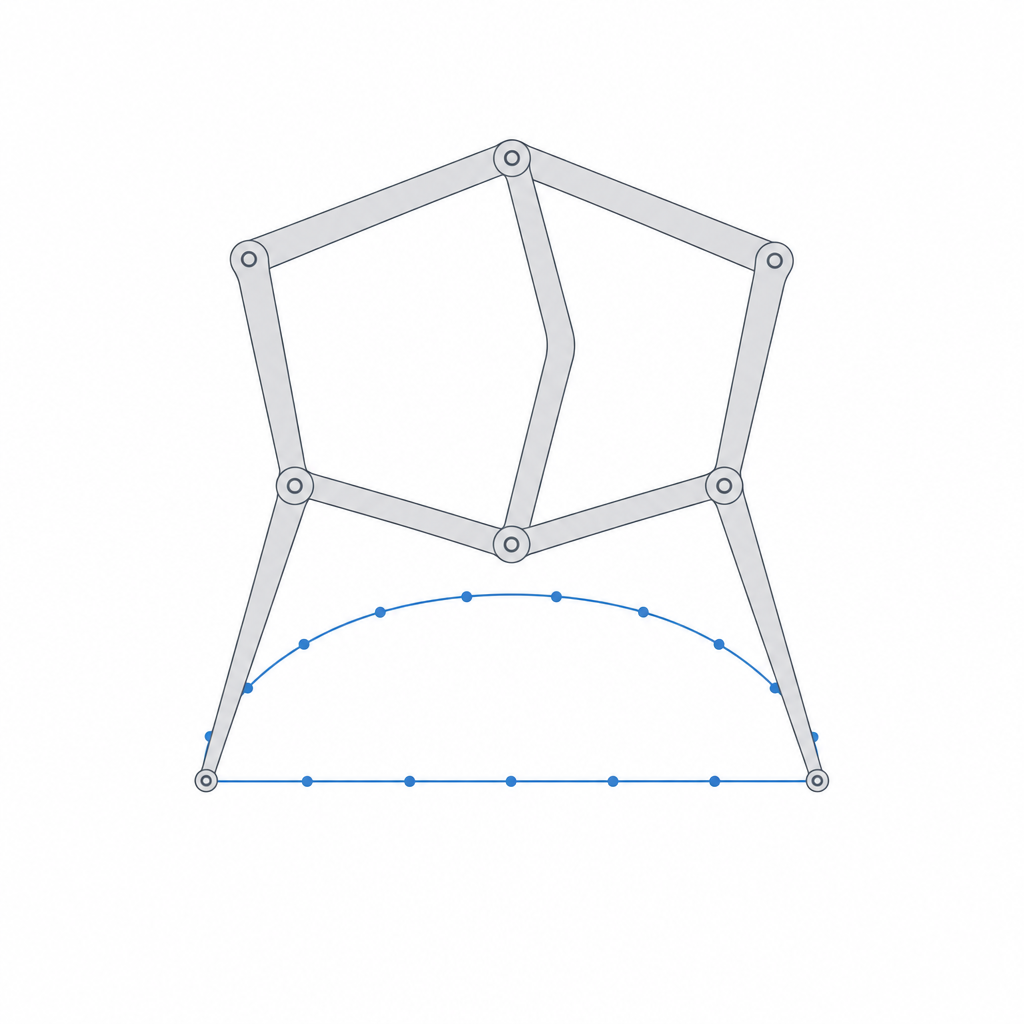
Lo único que importa de un varillaje de patas es la trayectoria que describe un punto concreto —el pie— cuando la manivela da una vuelta completa. Ese punto no pertenece a la manivela ni a ninguna barra anclada al bastidor: pertenece a un eslabón acoplador, una barra que flota conectada a otras dos, sin punto fijo propio. Un acoplador no gira ni oscila de forma simple; cada uno de sus puntos traza una curva cerrada distinta, a veces sorprendentemente complicada, y esa familia de curvas de acoplador es la materia prima de la que se hace cualquier mecanismo de movimiento. Diseñar una pata es elegir las longitudes de las barras hasta que un punto de ese acoplador trace exactamente la curva que camina.
¿Y qué forma tiene una curva que camina? Dos tramos bien diferenciados. Abajo, un tramo casi recto y casi horizontal: es la fase de apoyo. Mientras el pie recorre ese tramo está clavado en el suelo, y como su punto de contacto avanza en línea recta y a altura constante respecto al cuerpo, empuja el cuerpo hacia delante sin levantarlo ni dejarlo caer. Si ese tramo no fuera plano, el cuerpo botaría arriba y abajo a cada paso; si no fuera recto, el pie arañaría el suelo lateralmente y patinaría. Arriba, un arco amplio: es la fase de balanceo, el retorno por el aire. El pie se despega limpio, vuela hacia atrás respecto al cuerpo —hacia delante respecto al suelo— y vuelve a bajar al inicio del apoyo. Una vuelta de manivela, un paso. La curva del pie no representa el mecanismo: la curva del pie es el mecanismo, y todo lo demás son barras que existen únicamente para producirla.
El de Klann lo consigue con seis eslabones móviles —manivela, dos balancines anclados al bastidor, dos acopladores y la propia pierna— montados sobre el bastidor fijo; el de Jansen, con once barras por pata trabajando en dos lazos acoplados. Más barras dan una curva más fiel —un apoyo más plano, un despegue más limpio— a cambio de más juntas, que es exactamente donde el FDM cobra su peaje.
Por qué los números sagrados son intocables
Theo Jansen no derivó las longitudes de sus once barras con una fórmula cerrada: las buscó con un algoritmo genético que dejó corriendo durante meses, evaluando millones de combinaciones por la calidad de la pisada que producían. El resultado es un juego de once longitudes que él llama los números sagrados, y el adjetivo no es romántico, sino literal en sus consecuencias: son un óptimo estrecho. Esas proporciones concretas son las que hacen que el tramo de apoyo salga plano y nivelado y que el pie se levante con holgura suficiente para salvar el terreno en el retorno.
Lo que conviene entender antes de empezar a imprimir es que ese óptimo es frágil ante el cambio. Modifica una barra un poco y la curva del pie se deforma: el tramo de apoyo deja de ser plano y empieza a abombarse, el pie cabecea, o el arco de retorno se aplana y el pie roza el suelo en lo que debería ser vuelo libre. No es que el mecanismo deje de funcionar de golpe; es que cojea, y cojea de forma proporcional a cuánto te has desviado. Hay además un umbral más brusco que el cojeo gradual: ciertas combinaciones de longitudes hacen que la manivela ya no pueda dar la vuelta completa —deja de cumplir la condición de rotabilidad de Grashof— y el mecanismo se atasca a media revolución en lugar de caminar. No basta con que la curva salga bonita: la manivela tiene que poder rotar 360°.
Esto tiene una implicación directa y dura para quien imprime: las longitudes de tus barras son cotas críticas, no orientativas. La distancia que de verdad gobierna la marcha no es la longitud exterior de la barra que ves, sino la distancia entre los centros de los dos pivotes de cada eslabón —su longitud cinemática efectiva. Si por error de tolerancia un agujero queda descentrado o un eje sale grueso y se asienta a un lado de su juego, has cambiado esa distancia entre centros y has movido el número sagrado sin querer. Por eso un varillaje de patas castiga la imprecisión mucho más que un mecanismo tosco: no perdona desviaciones que en una bisagra ni notarías.
Un motor, varias patas, marcha continua
Una sola pata no camina: durante su fase de balanceo no toca el suelo, y si fuera lo único que sostiene el cuerpo, este caería. La locomoción continua nace de desfasar varias patas sobre la misma manivela. La tentación es pensar que con dos patas a 180° basta —una en apoyo mientras la otra balancea—, pero no es así: la fase de apoyo rara vez ocupa exactamente medio ciclo, de modo que con solo dos patas hay instantes en que ninguna empuja y, en un eje, dos patas no dan estabilidad lateral y el cuerpo vuelca. Por eso la marcha firme empieza en tres o cuatro patas por lado, repartidas en fases escalonadas: en todo momento hay varios pies en contacto y el cuerpo avanza sin botar ni quedarse sin soporte. El Strandbeest de Jansen lleva esta idea al extremo: filas de patas desfasadas accionadas por un único cigüeñal, de modo que un solo motor —o un solo golpe de viento— produce una marcha fluida y continua.
Esto es lo que hace al varillaje de patas atractivo frente a las ruedas: avanza sobre terreno irregular sin necesitar suspensión, porque cada pie se posa y se levanta describiendo su arco, salvando obstáculos que detendrían a una rueda de su tamaño. Robots y juguetes caminantes, plataformas todoterreno sencillas, demostraciones de que una red de barras genera locomoción sin un gramo de electrónica: ahí es donde brilla. Pero el desfase, que es su virtud cinemática, es también una exigencia de montaje. Las manivelas tienen que quedar caladas en sus ángulos correctos y el conjunto tiene que poder cruzar los puntos muertos —las posiciones donde manivela y biela quedan alineadas y el par de la manivela ya no produce movimiento útil. Con suficientes patas bien repartidas, mientras una cruza su punto muerto otra está plenamente en carga y arrastra al conjunto a través de él; con el faseado mal hecho, varias patas pueden coincidir en punto muerto y el mecanismo se bloquea, incapaz de arrancar.
El FDM y la maldición de los muchos pivotes
Aquí está el verdadero campo de batalla. Un cuatro barras tiene cuatro pivotes; una pata de Jansen ronda la docena de juntas, y una máquina completa, decenas. Y las holguras de los pivotes se acumulan a lo largo de la cadena. Cada junta tiene su pequeño juego —ese hueco entre eje y agujero sin el cual la articulación no giraría—, y en una cadena de barras esos juegos se encadenan a lo largo del recorrido de fuerza, de modo que el pie en la punta hereda el juego de todas las juntas aguas arriba. En el peor caso, cuando todos los juegos se alinean, se suman sin más; en el caso típico, al ser aleatorios e independientes, crecen más despacio —del orden de la raíz del número de juntas— pero no se cancelan. Y no se trata de una suma directa de milímetros: el juego de cada junta se amplifica por el brazo de palanca que la separa del pie, de modo que una décima de hueco en una junta cercana a la manivela puede convertirse en varios milímetros de bamboleo en la punta de la pata. El bamboleo no es solo estético: descompone la curva del pie, hace que las patas pierdan la sincronía fina entre sí y que la marcha se vuelva irregular, una cojera que aparece de la nada en un mecanismo geométricamente correcto.
La primera defensa es apretar las holguras junta por junta. Cada pivote individual quiere ir hacia el extremo ajustado de tu tabla de holguras —el juego justo para que gire libre y no un ápice más—, porque ese ápice de más, amplificado por la palanca y encadenado con los demás, es la diferencia entre una marcha firme y un temblor. La calibración real de tu impresora pesa aquí más que en ningún otro mecanismo de la sección; lo desarrolla Tolerancias para piezas que se mueven, y conviene fijar el hueco deslizante con una probeta antes de imprimir veinte pivotes con un número adivinado.
La segunda defensa es la rigidez de las barras, y se decide en la orientación de impresión. Las barras de un varillaje de patas trabajan a tracción y a compresión a lo largo de su eje, pero sobre todo no deben flexar lateralmente: si una barra se arquea bajo carga, mueve sus centros de pivote efectivos y vuelves a deformar la curva del pie, exactamente el mismo daño que un número sagrado mal cortado. Imprime todos los eslabones planos sobre la cama, tendidos en el plano XY. Así los cordones corren a lo largo de la barra, que es la dirección fuerte, y la flexión que el mecanismo le pide en el plano de la marcha ocurre a lo largo de las capas, no entre ellas. Cuidado: tendida en XY, la barra queda protegida frente a esa flexión dominante, pero expuesta frente a las cargas laterales fuera de plano —peso, desalineación—, que la doblan entre capas, la dirección débil que delamina; mantén canto suficiente también en esa dirección. Y dale sección generosa en el plano de flexión por otra razón: una barra a compresión, esbelta y larga, pandea bajo el peso de la máquina antes de partirse —las barras a tracción no pandean, solo rompen—, y un eslabón pandeado falsea el número sagrado de forma intermitente, lo peor de los dos mundos. El porqué de esta anisotropía está en Orientación de capas para el movimiento.
| Frente | Qué hacer | Por qué |
|---|---|---|
| Holgura por pivote | El hueco deslizante mínimo, calibrado con probeta | El juego se encadena y se amplifica por palanca hacia el pie |
| Longitudes de barra | Acotar y verificar centro a centro de pivotes | Los números sagrados son un óptimo estrecho |
| Orientación | Todos los eslabones planos en XY | Resisten la flexión dominante de la marcha sin delaminar |
| Sección de barra | Canto generoso en el plano de flexión | Evita el pandeo de las barras comprimidas |
| Pivotes que más giran | Buje o casquillo embebido | El plástico contra plástico se desgasta y abre juego |
Cómo se reconoce cada fallo
Cuando un varillaje de patas impreso camina mal, casi siempre es uno de estos cinco fallos, y conviene saber distinguirlos porque cada uno se arregla en un sitio distinto.
El primero es la marcha irregular por juego acumulado: la máquina avanza pero las patas tiemblan, se adelantan y atrasan unas respecto a otras, y el cuerpo cabecea. Se corrige apretando las holguras de los pivotes, empezando por los más cercanos a la manivela y el bastidor, que es donde el juego se amplifica por el brazo de palanca más largo hasta el pie; la última junta, la del propio pie, transmite su juego casi 1
y rinde mucho menos al apretarla. El segundo es la cojera por barras que flexan o pandean: la curva del pie sale deformada bajo carga aunque con la máquina en la mano y sin peso todo parezca correcto. Se combate con más canto de barra y mejor orientación, no con más apriete de juntas. El tercero es el desgaste rápido de los pasadores: son muchos, giran millones de ciclos y el plástico rozando contra plástico se lima, de modo que una junta que nació ajustada desarrolla juego con el uso y reintroduce el bamboleo que tanto te costó eliminar. El cuarto es el bloqueo en punto muerto por faseado incorrecto: la máquina no arranca, o se para siempre en la misma posición, porque varias patas coinciden en punto muerto y ninguna arrastra a las otras a través de él. Es un fallo de montaje y calado de manivelas, no de cotas. Y el quinto, ya mencionado, es el pandeo de eslabones esbeltos a compresión bajo el peso propio de la máquina, que es a la vez fallo estructural y fallo cinemático.El más insidioso es el tercero, porque el mecanismo nace bien y se degrada. Para las juntas que más giran —las próximas a la manivela, que dan una vuelta entera por cada paso— el plástico desnudo no es buen material de cojinete: aun a las pocas revoluciones de un caminante, donde el calentamiento por fricción es despreciable, el rozamiento en seco lima la pared poco a poco por desgaste abrasivo y abre juego. Ahí compensa embeber un buje o un casquillo en la junta, un anillo de algún material que resista el rozamiento mejor que el PLA, alojado en el eslabón impreso. Cómo presupuestar el alojamiento de esos insertos y casquillos para que entren firmes y no se salgan se desarrolla en Hardware embebido: imanes, rodamientos e insertos. Es la diferencia entre una pata que camina una tarde de demostración y una que camina mil ciclos sin desincronizarse.
Un varillaje de patas es el cuatro barras llevado a su conclusión: la misma curva de acoplador que en un mecanismo sencillo apenas insinúa una trayectoria útil, aquí, encadenada y refinada hasta el último milímetro, se convierte en una pisada. Respeta las longitudes exactas, persigue cada décima de holgura en cada pivote, tiende las barras planas y dales canto, y la red de barras caminará. Falla en cualquiera de esos frentes y cojeará. Antes de imprimir la primera pata, fija tu hueco deslizante real con la disciplina de Tolerancias para piezas que se mueven: en ningún otro mecanismo de esta sección esa décima decide tanto.