Eslabonamientos especiales: recta exacta (Peaucellier/Hart) y movimiento espacial (Bennett/Bricard)
Un cuatro barras te da una recta aproximada: el punto medio del acoplador de un Chebyshev recorre un tramo casi recto y luego se desvía, porque la curva que dibuja es una séxtica y solo es tangente a la recta en unos pocos puntos. Para casi todo, eso basta. Pero hay dos casos que el plano ordinario no alcanza, y ambos están en la frontera de lo que un mecanismo de barras puede hacer: la recta matemáticamente exacta —una trayectoria que es una recta de verdad, no una que se le parece— y el movimiento fuera del plano, una cadena cerrada que se mueve y se pliega en el espacio 3D. Son los Peaucellier-Lipkin y los Hart por un lado, y los Bennett y Bricard por otro. Y los traemos aquí con una advertencia que vale para todos: son los mecanismos a los que el FDM más castiga, porque su única virtud depende justo de las décimas de holgura que tu impresora no controla.
La recta exacta nace de invertir una circunferencia
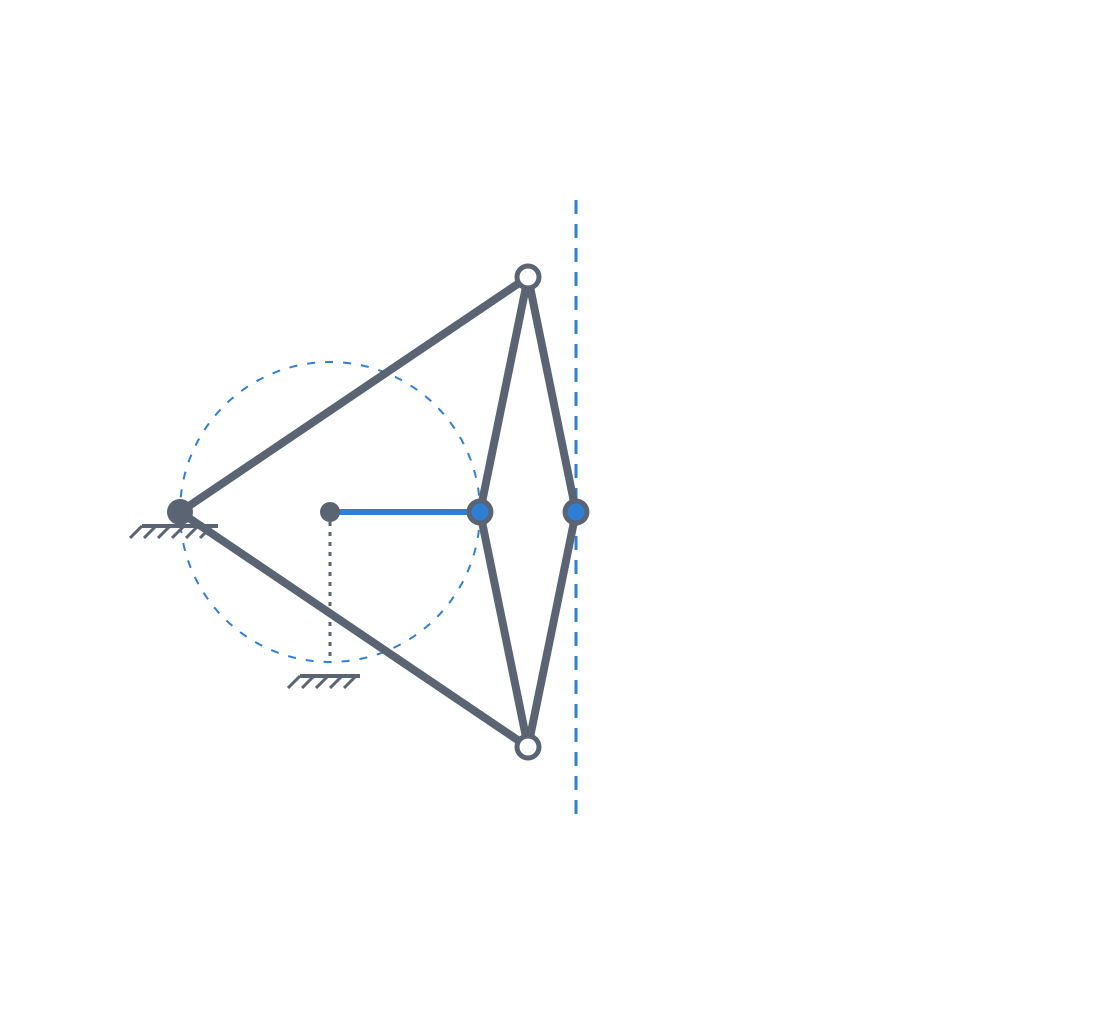
El inversor de Peaucellier-Lipkin resolvió en 1864 un problema que llevaba casi un siglo abierto —el de Watt, de hacia 1784—: trazar una recta perfecta con barras articuladas, sin guías ni superficies. Lo consigue realizando físicamente una inversión geométrica, la transformación que lleva un punto a distancia r del centro a otro a distancia k²/r sobre la misma recta radial. La clave de esa transformación es que convierte las circunferencias que pasan por el centro de inversión en rectas. Así que si obligas al punto de entrada a recorrer un arco de circunferencia que pase por el centro de inversión, el punto de salida invertido recorre forzosamente una recta exacta. No aproximada: exacta, porque es la consecuencia algebraica de la inversión, no el ajuste afortunado de una curva.
Quien obliga al punto de entrada a recorrer ese arco es una sola barra manivela anclada a un pivote fijo, y aquí aparece la primera cota crítica: la circunferencia que describe la entrada solo pasa por el centro de inversión si la longitud de la manivela es exactamente igual a la distancia entre su pivote y el centro de inversión. Esa igualdad no es un detalle de montaje, es lo que produce la recta. Equivócala en unas décimas y el arco deja de pasar por el centro, la inversión deja de mapear ese círculo a una recta, y lo que trazas es una curva suave que solo se le parece.
El conjunto que materializa la inversión es un rombo de cuatro barras iguales articulado en sus cuatro vértices, con dos barras más largas e iguales que unen dos vértices opuestos del rombo a un punto fijo. Esa simetría garantiza que el punto de entrada, el de salida y el pivote fijo queden siempre alineados y que el producto de sus distancias se mantenga constante: eso es la inversión. Contando la manivela de entrada son siete eslabones móviles y seis juntas de revolución. El de Hart hace lo mismo con menos barras —un contraparalelogramo de cuatro eslabones en lugar del conjunto rombo-más-barras—, a costa de una geometría más difícil de afinar. Ambos son la solución histórica al problema de la línea recta, y la diferencia con un Chebyshev no es de calidad sino de naturaleza: el Chebyshev imita la recta, el Peaucellier la genera.
Cuándo la aproximación no basta
La razón para pagar el coste de un inversor exacto es estrecha, pero real: cuando la desviación de un trazador aproximado te saca de tolerancia. Un Chebyshev o un Watt dibujan una recta con un error residual que crece hacia los extremos del recorrido; en una guía corta y poco exigente ese error desaparece bajo la holgura general del montaje. Pero en una guía de precisión, en el carro de un instrumento de medición o en cualquier sitio donde la rectitud sea la especificación y no un adorno, ese error residual es el límite de tu pieza. Ahí el inversor exacto deja de ser una curiosidad de libro y se convierte en la única topología de barras que te da una recta sin recurrir a un raíl deslizante —que es justo lo que un mecanismo de barras quiere evitar, porque arrastra rozamiento, desgaste y una superficie que mantener.
La cuenta es sencilla: si el error de un Chebyshev sobre tu recorrido es menor que el backlash que el FDM va a meter en tus pivotes, el inversor exacto no te compra nada y te cuesta tres eslabones más. Solo gana cuando tu exigencia de rectitud es más fina que la holgura que el resto del mecanismo arrastra. Antes de elegirlo, mide ese presupuesto de error completo, porque casi siempre es el backlash —y no la topología— lo que fija la recta que de verdad obtienes.
Los mecanismos espaciales se mueven por relaciones afinadas entre sus ejes
Cambia de problema. Un cuadrilátero cerrado de cuatro barras unidas por cuatro juntas de revolución es, en el espacio general, una estructura sobrerrestringida: el criterio de movilidad de Grübler-Kutzbach le asigna M = 6(n−1−j) + Σf = 6(4−1−4) + 4 = −2 grados de libertad, y un número negativo predice no ya que no se mueva, sino que le sobran restricciones. Y sin embargo el Bennett se mueve. Es una cadena cerrada de cuatro eslabones con cuatro juntas de revolución cuyos ejes no son ni paralelos ni concurrentes, y que pese a la cuenta tiene un grado de libertad. El truco —porque lo es— está en que no es un mecanismo genérico: solo se mueve si sus barras y sus ejes cumplen unas relaciones especiales y concretas. Eslabones opuestos de igual longitud (a₁ = a₃, a₂ = a₄), ángulos de torsión opuestos iguales (α₁ = α₃, α₂ = α₄), desplazamientos a lo largo de los ejes nulos, y la condición de cierre que los liga a todos: sin α₁ / a₁ = sin α₂ / a₂. La movilidad no viene de añadir juntas: viene de que la geometría está afinada para que esas restricciones, en vez de ser independientes y bloquearse, se solapen y dejen libre un modo de movimiento. El déficit de −2 que predijo Grübler es exactamente lo que la afinación geométrica anula para devolver 1 grado de libertad. Por eso a estos mecanismos se les llama paradójicos o sobrerrestringidos.
El Bricard lleva la misma idea a seis eslabones: una familia de mecanismos de seis juntas de revolución —line-symmetric, plane-symmetric, trihedral y los demás tipos— que se mueven por la misma razón, con ejes orientados en 3D bajo relaciones que convierten una cadena aparentemente sobrerrestringida en un mecanismo de un grado de libertad. Conviene no confundirlos con el octaedro flexible de Bricard, que es un objeto emparentado pero distinto: una superficie poliédrica que flexa, no una cadena de barras. La consecuencia práctica de la familia de seis barras es lo que la hace valiosa: el movimiento ya no está confinado a un plano. Un Bennett barre una trayectoria espacial; una red de Bennett o de Bricard se despliega y se pliega en 3D. Por eso son la base de estructuras desplegables, de mecanismos plegables y de articulaciones que tienen que sacar el movimiento fuera del plano de impresión —cosas que ninguna cadena plana puede hacer por mucho que la articules.
El FDM penaliza justo lo que estos mecanismos aportan
Aquí está el problema común a las dos familias, y por qué los traemos con reservas. Lo que un Peaucellier aporta es exactitud; lo que un Bennett aporta es movilidad espacial. Y las dos cosas dependen de mantener simultáneamente ángulos precisos en muchos pivotes a la vez —el Peaucellier tiene seis juntas, los espaciales tienen ejes orientados en 3D que hay que clavar en su ángulo—. Es justo lo que el FDM hace peor.
El primer enemigo es la acumulación de backlash. Cada pivote impreso arrastra su holgura, y esa holgura se suma a lo largo de la cadena. En un trazador exacto, el juego de los pivotes desplaza los puntos del rombo respecto a sus posiciones teóricas; como el inversor amplifica geométricamente el movimiento de entrada, esa holgura se traduce en un error de trayectoria que puede ser mayor o menor que el juego nominal según la posición a lo largo del recorrido, pero que en cualquier caso rompe la constancia del producto de distancias y curva la recta. El inversor se degrada a aproximado y pierde su única ventaja sobre un Chebyshev, que es más simple y tolera mucho mejor ese mismo juego. Has pagado tres barras de más para acabar con la recta de un trazador de cuatro.
Para la recta exacta, la receta es exigente y va en un solo sentido: pivotes muy ajustados y barras rígidas, en el fondo del rango de holgura, lejos del juego generoso que recomendarías para un pivote burdo —eso lo decides con el presupuesto de holgura de Tolerancias para piezas que se mueven, sabiendo que aquí trabajas en el fondo del rango, no en el centro—. La rigidez de las barras importa tanto como el pivote, porque una barra que flexa bajo carga miente sobre su longitud igual que un pivote con juego miente sobre su posición, y el inversor solo da recta exacta sobre longitudes exactas.
Pero esa receta abre un conflicto de fabricación que no puedes ignorar. Imprimir una barra esbelta rígida pide tumbarla con su dimensión larga en el plano de la cama y la fibra siguiendo el eje, no apilada entre capas, como detalla Orientación de capas para el movimiento: cargada a lo largo de la línea de capa flexa y delamina justo donde más penaliza. Solo que tumbar la barra deja los agujeros de pivote con su eje horizontal, paralelo a la cama, que es la peor orientación posible para un agujero —pie de elefante en la boca, sección elíptica, voladizo en la parte alta del taladro—. Un agujero impreso con su eje vertical sale redondo y ajustado; uno horizontal sale ovalado y con más juego. De modo que la orientación que te da barras rígidas es justo la que te empeora los pivotes que querías ajustados. No hay una respuesta limpia: tendrás que repartir el compromiso, casi siempre tumbando las barras y recuperando la redondez de los agujeros con un escariado o un repasado a mano.
Los espaciales piden lo contrario: holgura, no apriete
Para los mecanismos espaciales la receta se invierte, y este es el error más fácil de cometer al saltar de una familia a otra. Un Bennett o un Bricard son sobrerrestringidos: son hipersensibles a errores de fabricación en todas las juntas a la vez, porque cada eje mal clavado lucha contra los demás. Si además aprietas los pivotes al mínimo juego, no tienes margen para absorber esos errores de orientación, y el mecanismo se autobloquea por interferencia entre eslabones —se agarrota, no porque le sobre restricción matemática, sino porque la geometría real ya no cierra y las piezas se empujan entre sí—.
La salida pragmática es la opuesta a la del inversor: holgura deliberada en las juntas, ligeramente sub-restringidas, para que el juego de cada pivote absorba el error de orientación de los ejes y el mecanismo se mueva pese a no ser geométricamente perfecto. Pagas ese movimiento en precisión —un Bennett con juego barre una trayectoria algo sucia—, pero un mecanismo que se mueve con holgura vale más que uno perfecto sobre el papel que sale de la cama convertido en un bloque. Sube dentro del rango de holgura en lugar de bajar, al revés que en la recta exacta.
La orientación entra aquí en conflicto directo con la regla de tumbar la pieza: en un espacial, un eje de junta sale del plano por definición, y no puedes ponerlos todos horizontales ni todos verticales. Tendrás que elegir qué eje sacrificas a los voladizos y cuál proteges, porque rara vez podrás orientarlos todos bien a la vez —otra razón más para darles holgura, que perdona lo que la orientación no puede arreglar.
Modos de fallo: la recta se curva, el espacial se bloquea
Conviene nombrar los dos fracasos por separado, porque son distintos y se diagnostican de forma distinta.
El de la recta exacta es silencioso: el mecanismo monta, gira y traza algo parecido a una recta, pero en cuanto hay backlash o flexión esa recta se vuelve aproximada. No se rompe nada, no se atasca nada —simplemente pierde la propiedad por la que lo elegiste, y acabas con un inversor de siete eslabones que rinde como un trazador de cuatro—. El fallo es de prestaciones, no de función, y por eso es traicionero: lo descubres midiendo la trayectoria, no mirando el mecanismo. Si no vas a medir la rectitud, no tienes forma de saber que el Peaucellier ha dejado de cumplir su única razón de ser.
El del espacial es ruidoso y categórico: si los ángulos de eje impresos se desvían de la condición geométrica y no les diste holgura para absorberlo, el mecanismo no se degrada de forma gradual, se atasca o se vuelve rígido. Pasa de un grado de libertad a cero. Lo notas en el primer intento de moverlo, porque no se mueve. Es el fallo más honesto de los dos, pero el menos indulgente: no hay apenas margen entre "funciona" y "es un bloque", y ese margen lo fijan unos pocos grados en la orientación de las juntas que el FDM no garantiza sin un montaje cuidado —o sin la holgura que se lo perdone.
| Familia | Lo que aporta | Sensibilidad crítica | Receta de holgura | Modo de fallo |
|---|---|---|---|---|
| Peaucellier-Lipkin | Recta exacta por inversión geométrica | Constancia del producto de distancias; manivela = distancia pivote-centro | Fondo del rango: pivotes ajustados, barras rígidas | El backlash curva la recta: se degrada a aproximado |
| Hart | Recta exacta con menos eslabones | Geometría del contraparalelogramo, más difícil de afinar | Igual que Peaucellier, con menos margen | Igual que Peaucellier |
| Bennett | Movimiento espacial 1 GDL con 4 barras | a₁=a₃, a₂=a₄; α₁=α₃, α₂=α₄; sin α₁/a₁ = sin α₂/a₂ | Alto del rango: holgura deliberada para absorber error de ejes | Ángulo desviado y sin holgura → se autobloquea |
| Bricard | Plegado y despliegue espacial 1 GDL con 6 barras | Orientación 3D de los seis ejes | Igual que Bennett: holgura generosa | Igual: pierde movilidad y se agarrota |
Trátalos como lo que son: piezas de concepto, el escalón que subes solo cuando la recta aproximada de un Chebyshev o el movimiento confinado a un plano de un cuatro barras no te bastan. Asume al elegirlos que el FDM penaliza fuerte aquello en lo que se juegan su valor —la exactitud de las longitudes en el inversor, la precisión de los ejes en el espacial—, exactamente lo que una impresora de filamento controla peor. Y recuerda que la disciplina que los salva no es la misma para las dos familias: para la recta exacta, el fondo del rango de holgura de Tolerancias para piezas que se mueven y barras tan rígidas como puedas; para el espacial, lo contrario, holgura generosa que perdone el error de orientación que la cama no clava. La orientación de capa de Orientación de capas para el movimiento manda en ambas, y en ambas obliga a un compromiso entre la rigidez de la barra y la redondez del pivote que tendrás que repartir a mano.