Deslizadera o rueda con posiciones de retención
Un control con detente es un mecanismo que te devuelve información por el dedo: lo mueves y, en vez de deslizar liso, notas un tope, vences una resistencia y caes con un clic en la siguiente posición. Esa sensación —el detente— no es un adorno táctil, es memoria de posición sin electrónica. Un selector de modo que se queda donde lo dejaste, una rueda de ajuste que cuenta pasos discretos, un pomo indexado que sabes que está en la muesca cuatro porque lo sentiste caer. Todo eso sale de una pieza elástica que presiona contra una fila de muescas, y todo el carácter del control —si los clics son firmes o blandos, si dura un año o se desgasta en una tarde— se decide en la geometría de esa muesca y en cómo flexa el elemento que la recorre. En FDM, además, hay un suelo de resolución por debajo del cual el clic simplemente deja de existir.
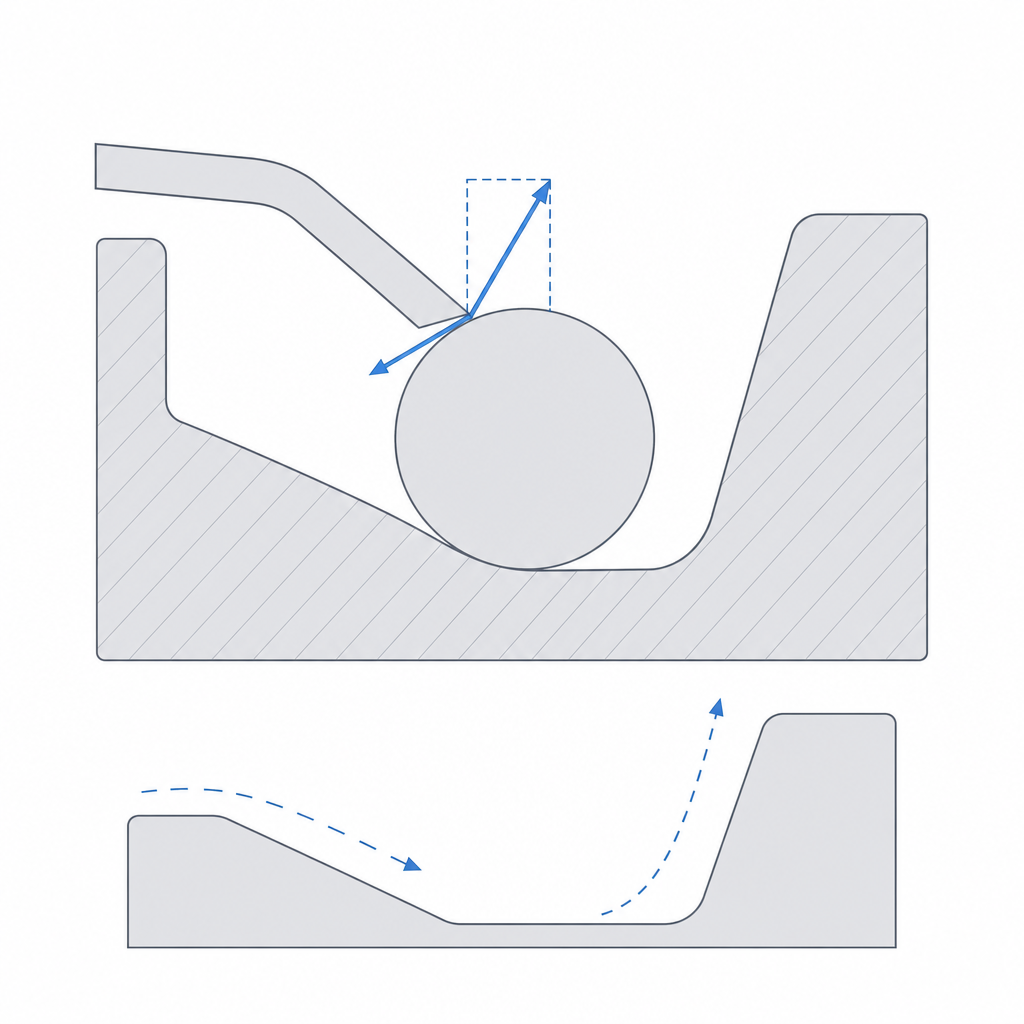
La mecánica del detente: un flexor contra una rampa
Un detente es siempre la misma pareja: un elemento elástico que empuja, y una serie de muescas en las que ese elemento quiere caer. El elástico puede ser una bola sobre un muelle, un saliente flexible impreso de una pieza, o un anillo de detente que se deforma al pasar. La cinemática no cambia: en cada posición estable, el flexor reposa en el fondo de una muesca, relajado, empujando contra las paredes que lo rodean. Para moverte a la siguiente, tienes que sacarlo de ahí, y para sacarlo tienes que comprimirlo subiéndolo por la rampa de la muesca hasta el resalte que separa una de otra. Ese ascenso es el clic: la fuerza sube mientras el saliente se comprime, llega a un máximo en la cresta y cae de golpe cuando se descuelga por la otra cara hacia la muesca siguiente.
La fuerza que necesitas para vencer ese paso tiene dos factores, y conviene tenerlos separados porque se ajustan por separado. Uno es la rigidez del flexor: cuánto se opone a comprimirse. Un muelle duro o un saliente grueso piden más fuerza para el mismo recorrido. El otro es la geometría de la rampa: cuánto sube el flexor —la profundidad de la muesca— y con qué pendiente —el ángulo de la rampa—. Conviene no confundir esos dos ejes. La profundidad fija cuánto se comprime el flexor: muesca más honda, más compresión, más fuerza normal almacenada. El ángulo no cambia la compresión a igual profundidad; lo que cambia es cuánta de esa fuerza normal se convierte en resistencia que sientes en el dedo. Lo que vences al mover el control es la fuerza tangencial, y es la fuerza normal del flexor proyectada por la pendiente: a grandes rasgos crece con la tangente del ángulo de la rampa más la fricción. Por eso una rampa empinada da un clic más duro aunque la muesca tenga la misma profundidad: no comprime más, proyecta más. Una rampa tendida convierte el ascenso en una cuña suave en la que casi toda la fuerza normal se va en recorrido y poca en resistencia; una rampa empinada concentra esa resistencia en un tramo corto y seco. Sube la rigidez o la profundidad y el flexor empuja más fuerte; empina la rampa y ese empuje se traduce en más resistencia tangencial. Baja cualquiera de los dos y el control se ablanda hasta que el detente desaparece y vuelve a deslizar liso.
La forma de la muesca define el tacto
Una vez entiendes que la rampa proyecta el empuje del flexor, la forma de la muesca deja de ser estética y pasa a ser el control de tacto que tienes en la mano. Cada parte de la muesca hace un trabajo distinto.
Las caras laterales —las rampas— marcan la transición. Si son suaves, dan un detente blando que cede con poca fuerza y se nota más como una preferencia que como un tope; el control quiere quedarse en la muesca pero no se resiste si lo mueves. Si son empinadas, dan un enclavamiento firme: el flexor tiene que comprimirse más y, sobre todo, la pendiente convierte esa compresión en una fuerza de paso alta, así que el clic es seco. Si llevas las paredes casi verticales tienes un detente que retiene de verdad, casi un cierre; el control no se mueve solo ni con vibración, pero exige fuerza deliberada para cambiar de posición.
Hay una palanca más en las rampas, y es la asimetría. Nada te obliga a que las dos caras de la muesca tengan el mismo ángulo. Si haces una cara empinada y la otra tendida, cuesta más fuerza entrar en la posición por un lado que salir por el otro —es la base del trinquete y de los detentes direccionales—. Lo mismo sirve para una posición de "aparcado" a la que quieres que el control entre fácil pero de la que cueste sacarlo sin querer: rampa de entrada tendida, rampa de salida empinada. La fuerza de subida y la de bajada dejan de ser la misma y eso te da histéresis controlada, una herramienta táctil que un detente simétrico no tiene.
El fondo decide cómo de definida es la posición. Un fondo plano da una zona de reposo estable: el flexor se asienta y no tiene preferencia por un punto exacto dentro de ese plano. Eso da una posición robusta, pero con un punto muerto que vale exactamente el ancho del fondo menos el ancho de contacto del flexor; un fondo apenas más ancho que el flexor da un punto muerto pequeño, uno mucho más ancho lo da grande, y el control acepta holgura lateral antes de empezar a centrar. Una muesca en V, en cambio, no tiene fondo plano: el flexor cae hasta el vértice y se centra solo, porque cualquier desviación lo empuja por una de las dos rampas de vuelta al punto bajo. La V es lo que quieres cuando la posición tiene que ser exacta y repetible —un posicionador, un selector que alinea algo—; el fondo plano, cuando solo quieres que el control se quede quieto en una región. La mayoría de los buenos detentes son alguna versión de V suavizada: rampas de subida que dan el clic y un valle estrecho que centra.
El suelo de resolución: por debajo de unas décimas no hay clic
Aquí es donde el FDM impone su propia regla, y es la que más detentes impresos arruina de entrada. Una muesca es un detalle pequeño y agudo: una rampa que sube, una cresta, otra rampa que baja. La impresora reproduce ese perfil depositando cordones de unos 0,4 mm de ancho, y no puede dibujar un detalle más fino que su propio cordón. Pero el ancho de cordón no es el único límite: cuando la muesca tiene componente vertical —la rampa sube en Z—, la altura de capa cuantiza el perfil en escalones. Con capas de 0,2 mm, una muesca de 0,3 mm de profundidad son apenas capa y media, la cresta sale redondeada y el flexor resbala por una ondulación blanda en vez de enganchar en una muesca con cresta definida. El clic, sencillamente, no aparece.
La consecuencia práctica es que las muescas de un detente impreso tienen que ser generosas en profundidad y paso. Como cifra de trabajo, busca al menos 0,5 a 0,8 mm de profundidad para un clic claro, no las dos o tres décimas con las que el perfil se diluye, y deja la cresta entre muescas lo bastante ancha para que el cordón la forme entera en lugar de comérsela. Un detente con doce posiciones diminutas en una rueda pequeña no se imprime con la definición suficiente; el mismo control con seis muescas más profundas sí. Si necesitas muchas posiciones finas, ese es el caso para meter hardware —se explica en Hardware embebido: imanes, rodamientos e insertos— en lugar de exprimir la resolución de la impresora.
Y está la orientación, que aquí pesa doble porque hay dos piezas que sufren, no una. El flexor del detente trabaja a flexión cada vez que vence una muesca, así que es una viga en voladizo sometida a miles de ciclos, y vale para él la regla de cualquier pieza que flexa: imprímelo en el plano de las capas, no de canto. Si las capas se apilan en la dirección en la que el saliente se dobla, cada clic tira de la unión entre capas y el flexor delamina por la raíz —se abre como una grieta limpia, muchas veces antes de desgastarse siquiera—. Tendido en el plano de las capas, la flexión sigue los cordones y el saliente aguanta los ciclos para los que lo diseñaste. Pero la pista de muescas también tiene su orientación preferida: las crestas reciben el rozamiento y el golpe del clic, y si quedan formadas por líneas de capa transversales al movimiento se pelan o delaminan con el uso. El problema es que las dos piezas compiten: muchas veces la orientación ideal del flexor no es la ideal de las muescas, y si van en la misma pieza tienes que decidir cuál de las dos sacrificas o separarlas en piezas distintas. La lógica completa de por qué la orientación decide la resistencia a flexión está en Orientación de capas para el movimiento.
Holguras: la carga lateral del detente ladea el control
Un detente no vive solo: vive montado sobre una guía que desliza o un eje que gira, y ese soporte tiene que estar bien resuelto o el detente lo estropea. La guía o el eje necesitan un ajuste libre, holgura suficiente para moverse sin agarrotarse, exactamente como cualquier pieza que se mueve —los números de arranque están en Tolerancias para piezas que se mueven—. Pero el detente añade una carga lateral que un deslizador liso no tiene: el flexor presiona contra las muescas con una fuerza perpendicular al movimiento, y esa fuerza tiene que apoyarse en algún sitio.
Si el detente presiona fuerte y el control no tiene un buen apoyo enfrentado a esa carga, se produce el fallo típico: la presión lateral ladea el control dentro de su guía. En vez de deslizar recto, el control se inclina, muerde la guía por una esquina y se agarrota —y cuanto más fuerte aprieta el detente, peor es el efecto—. Es el fallo clásico de una deslizadera con detente mal soportada: cuanto más firme querías el clic, más se atasca el conjunto. La solución es geométrica: o apoyas el control contra la carga del detente con una pared o un riel enfrentado, de modo que esa fuerza se reparta y no genere par, o sitúas el detente de forma que su empuje pase por el centro de la guía y no haga palanca. Un detente bien diseñado presiona contra algo que lo aguanta sin torcer el control; uno mal diseñado convierte su propia fuerza de retención en agarrotamiento.
Modos de fallo: el saliente se aplana y pierde el clic
Un detente íntegramente en plástico falla casi siempre por el mismo sitio: el flexor pierde su empuje con el tiempo, y sin empuje no hay clic. Hay dos mecanismos, y los dos atacan al saliente flexible. Uno es el desgaste: el saliente roza contra las muescas en cada uso, y un saliente de plástico rozando contra crestas de plástico se redondea, se lima, y al cabo de muchos ciclos su punta deja de encajar limpia en la muesca. El otro es la fluencia (creep): el plástico cargado de forma sostenida fluye despacio y se deforma de manera permanente. El caso que mata el detente no es el flexor que reposa relajado en el fondo de una muesca —ahí, por definición, está descargado—; es el diseño que deja precarga permanente, un flexor que nunca llega a relajarse del todo ni siquiera en su posición de reposo. Ese vive cargado a todas horas, y con los meses se aplana, pierde altura efectiva, y el detente que tenía clics firmes empieza a sentirse impreciso hasta que desaparece. Y no creas que el PLA se libra por ser rígido: es frágil en el saliente —delamina o casca antes de doblarse mucho— pero además fluye a temperatura ambiente bajo carga sostenida más de lo que su rigidez sugiere; el PETG y el nylon flexan mejor pero también fluyen. Ningún material te libra del problema gratis.
La defensa que de verdad alarga la vida útil es no fiar el empuje al plástico. Una bola metálica con un muelle real —hardware embebido alojado en una cajera impresa— dura órdenes de magnitud más que cualquier saliente impreso: el muelle de acero no fluye, no pierde fuerza con los ciclos, y la bola de metal rozando contra muescas de plástico se desgasta despacio porque es la parte dura del par. El plástico solo aporta el alojamiento y las muescas; toda la elasticidad la pone el muelle, que está hecho para eso. Para un control de uso frecuente que vas a usar a diario durante años —un selector que se mueve mil veces—, esa bola con muelle es la diferencia entre un mecanismo que mantiene su tacto y uno que se ablanda en unos meses. Cómo dimensionar el alojamiento y asentar el hardware sin que se salga ni baile lo tienes en Hardware embebido: imanes, rodamientos e insertos.
Si te quedas con el detente íntegramente en plástico por simplicidad —y para un control de uso esporádico es perfectamente razonable—, dale al saliente margen contra los dos modos: hazlo lo bastante largo y con su radio de acuerdo en la raíz para que flexe sin acumular deformación permanente excesiva, y no lo dejes precargado en reposo, porque la fluencia se ceba justo en lo que vive cargado. Es el mismo razonamiento de interferencia y apriete que mata los encajes a presión cuando te pasas de tensión: lo desarrolla Interferencia sin agrietar. Un detente diseñado para reposar relajado en sus muescas, y comprimirse solo durante el instante del paso, conserva su clic mucho más que uno tenso a todas horas.
Decide pronto si tu control es de uso esporádico o de uso frecuente, porque esa respuesta manda sobre todas las demás: un selector que se toca de vez en cuando aguanta de sobra sin hardware, mientras que una rueda que el usuario va a girar mil veces pide la bola con muelle desde el principio. A partir de ahí, todo lo demás —la profundidad de muesca, la rigidez del flexor, el apoyo de la guía— sale de la misma calibración de holguras que cualquier otra pieza que se mueve, y la tienes en Tolerancias para piezas que se mueven.