Cabrestante de cable: reducción suave y sin holgura
Un cable enrollado unas cuantas vueltas alrededor de un tambor puede retener una tensión muchas veces mayor que la que tú aplicas por el otro extremo, sin nudos, sin mordazas y sin que el cable deslice. Es el efecto que mantiene amarrado un barco con un marinero sujetando el chicote. Y es la base del cabrestante de cable: un tambor pequeño tira de una polea grande a través de un cable bobinado, y de ahí sale una reducción de resolución finísima, sin holgura y prácticamente silenciosa. Por eso lo eligen los brazos robóticos finos, las monturas de telescopio y los dedos de pinza que tienen que moverse con suavidad y sin tirones. No hay dientes que engranen ni juego que recuperar: solo un cable bien guiado y bien tensado. Y como casi todo en FDM, funciona o falla por unas décimas de geometría —aquí, las de la ranura que guía el cable.
Por qué pocas vueltas retienen tanta tensión
La física del cabrestante es de las pocas que se puede escribir en una línea y entender entera: la tensión que el cable es capaz de retener crece exponencialmente con el ángulo que abraza el tambor. La fórmula es la de Euler-Eytelwein, T_tensa = T_floja · e^(μθ), donde μ es el coeficiente de rozamiento entre cable y tambor y θ el ángulo de abrazado total, medido en radianes. Lo que importa no es la fórmula sino lo que dice: cada vuelta que das suma 2π radianes a θ, y como θ está en el exponente, la capacidad de retención no se suma, se multiplica.
Veámoslo con números. Con un coeficiente de rozamiento modesto, μ = 0,3, una sola vuelta completa (θ = 2π) te da un factor e^(0,3·6,28) ≈ 6,6: el lado tenso aguanta casi siete veces la tensión del lado flojo sin que el cable se mueva. Tres vueltas (θ = 6π) lo llevan a e^(0,3·18,8) ≈ 290. La progresión es brutal precisamente porque es exponencial: por eso un cabrestante no necesita ninguna fuerza radial externa que apriete el cable contra el tambor —ningún rodillo presor, ninguna mordaza—; basta con dar las vueltas suficientes. La fuerza normal que crea el rozamiento la pone el propio cable al curvarse tenso sobre el tambor.
Ahora bien, ese efecto Euler-Eytelwein no es lo que transmite el par en un cabrestante de robótica, y conviene tenerlo claro desde el principio para no dimensionar con la fórmula equivocada. Distingue dos máquinas que comparten nombre. El cabrestante de fricción —el del marinero— tiene un extremo libre: el cable da vueltas sobre el tambor y se sujeta solo por rozamiento, y ahí sí manda Euler-Eytelwein. El cabrestante de transmisión (capstan drive), el que mueve un brazo o una montura, tiene el cable anclado por los dos extremos: el par pasa por tensión directa del cable, no por agarre. En ese caso las vueltas no están para retener la tensión de salida, sino para repartir la carga a lo largo del tambor, mantener contacto durante el bobinado y evitar que todo el esfuerzo recaiga sobre el punto de anclaje. El resto de este artículo trata del segundo, porque es el que te interesa para mover algo con precisión.
La reducción real, y dónde está su techo
La reducción de un cabrestante de transmisión sale de la geometría de bobinado, no de poner dos cilindros tangentes como en una correa. El cable se enrolla en el tambor motriz de radio pequeño y queda anclado a un sector de salida de radio grande; cuando el tambor gira, recoge o suelta cable y arrastra el sector. La relación de velocidades, y la de par, es la de los dos radios: i = R_salida / R_tambor. Es como un par de engranajes, pero sin dientes y sin holgura de inversión (backlash).
Eso no la convierte en una reducción ilimitada. Una sola etapa de cabrestante da relaciones prácticas de ~5 a ~20, limitadas por dos cosas: cuántas vueltas de cable caben a lo largo del tambor sin que el bobinado se desordene, y hasta dónde puedes estrechar el tambor antes de que el cable, al curvarse en un radio pequeño, sufra y el rozamiento de flexión se dispare. Para relaciones mayores se encadenan etapas, igual que en un tren de engranajes. Si esperabas una reducción enorme de una sola pasada, ajusta la expectativa: lo que el cabrestante te da por encima de un engranaje no es ratio, es suavidad y ausencia de holgura.
Y hay una limitación de primer orden que es fácil olvidar: el recorrido es finito. El tambor solo puede girar las vueltas que tenga cable bobinado antes de agotarlo en un ramal, así que el rango angular de salida está acotado por la longitud de cable y el radio del tambor. Un cabrestante no da rotación continua. Para un dedo de pinza o un eje de cámara que recorren unos grados eso sobra, pero si lo que persigues es seguimiento continuo —una montura que sigue una estrella sin tope— tienes que diseñar el recorrido con holgura o aceptar que habrá que rebobinar.
Cuándo es la transmisión correcta y cuándo no
El cabrestante brilla en un nicho muy concreto: cuando lo que quieres es precisión y suavidad, no fuerza bruta. Cero backlash, inercia bajísima —un cable pesa casi nada comparado con un tren de engranajes— y un funcionamiento silencioso porque no hay impactos de diente contra diente. Para una cámara que tiene que apuntar sin saltos, una montura de telescopio que sigue una estrella, o el dedo de una pinza robótica que cierra con tacto, es difícil de batir. Con el cable anclado por los dos extremos, cada paso del motor es un paso real en la salida, sin holgura intermedia, y eso es exactamente lo que un sistema de posicionamiento fino necesita.
Lo que no es es una transmisión de potencia. Mientras el cable esté bien anclado, no patina bajo carga normal —tira por tensión directa—, pero el conjunto tiene su límite por otro lado: si la carga supera lo que el cable o el anclaje aguantan, el cable se estira en exceso, el anclaje cede o, en un bobinado mal dado, las vueltas empiezan a deslizar sobre el tambor antes de que el anclaje tome el relevo. No hay un fallo catastrófico, pero tampoco hay forma de pasar par continuo elevado por un cable fino. Para arrastrar cargas pesadas o mantener un par alto de forma sostenida, lo correcto es un engranaje o una correa dentada, no un cabrestante. Conoce el límite de tu cable y de tus anclajes, y diseña para quedarte holgadamente por debajo.
El tambor: una hélice que guía cada vuelta
Aquí es donde el FDM entra en juego, y donde el cabrestante se juega su rendimiento. Si enrollas el cable sobre un tambor cilíndrico liso, las vueltas no tienen dónde asentarse: al tensar, una vuelta se desliza lateralmente y se monta sobre la de al lado. Cuando dos tramos de cable se cruzan y se pisan, el bobinado se desordena, la carga deja de repartirse de forma uniforme y, en el peor caso, el cable se atasca y bloquea el movimiento. Es el principal modo de fallo de un cabrestante mal diseñado.
La solución es modelar el tambor con una ranura helicoidal, una rosca de paso igual al diámetro del cable, que recibe cada vuelta en su propio canal y la mantiene separada de la siguiente. La hélice fija dónde va a apoyarse cada tramo, impide que se monten y reparte el bobinado de forma limpia a lo largo del tambor. El paso de la hélice debe ser ligeramente mayor que el grueso del cable para que entre sin forzar pero sin holgura que le permita saltar de canal. Cuenta además con que un cable trenzado se aplana y ensancha al tensarse: deja margen para ese ensanche y no te quedes en el límite. Es el mismo razonamiento de margen por lado que gobierna cualquier ajuste impreso y que tienes desarrollado en Tolerancias para piezas que se mueven.
Imprime el tambor con su eje vertical sobre la cama. Así la ranura helicoidal se genera como un contorno horizontal que va girando capa a capa, y las paredes del canal salen bien definidas. Cuenta con un matiz: el "techo" de cada canal —la pared superior de la rosca— es un voladizo cuyo ángulo depende del paso. Con pasos pequeños ese voladizo queda muy tendido y se imprime sin problema; con cables gruesos y pasos grandes puede colgar y pedir un retoque de orientación o de geometría. Tumbar el tambor es peor por otro motivo: la sección circular obliga a soportar la mitad inferior y la ranura sale irregular justo donde tiene que guiar el cable. Esta orientación tiene además la otra cara que cuenta Orientación de capas para el movimiento: decide hacia dónde apuntan los planos débiles del tambor, y un tambor solicitado a torsión por el cable prefiere las capas perpendiculares a su eje.
Decide ya en el modelo cómo vas a anclar los dos extremos del cable. En un cabrestante de transmisión esto no es un detalle de montaje: es lo que transmite el par. Cada chicote tiene que quedar fijado al tambor y al sector de salida, porque la tracción pasa por el cable anclado, no por el rozamiento del bobinado. Lo habitual es un nudo alojado en una cavidad ciega —un ensanche interior donde el nudo queda atrapado y no puede salir por el agujero de paso— o un pequeño tornillo prisionero que pince el cable contra la pieza. Modela esa cavidad o ese asiento de tornillo en el mismo paso en que dibujas la hélice; resolverlo después, con el tambor ya impreso, casi siempre obliga a reimprimir.
| Parámetro | Valor de partida | Por qué |
|---|---|---|
| Paso de la hélice | Ø cable + 0,15–0,3 mm | una vuelta por canal, sin que se monten ni queden flojas; deja margen para el ensanche del cable al tensarse |
| Anchura del canal | Ø cable + holgura por lado | el cable asienta sin forzar; ver Tolerancias para piezas que se mueven |
| Fondo del canal | redondeado, r ≥ Ø cable / 2 | una arista viva corta el cable por flexión (acero) o por abrasión (Dyneema) |
| Vueltas de abrazado | 2–4 | reparten la carga y descargan el anclaje durante el bobinado |
| Anclaje de extremos | cavidad para nudo o prisionero | sin anclar no hay par: el cable solo apretaría, no traccionaría |
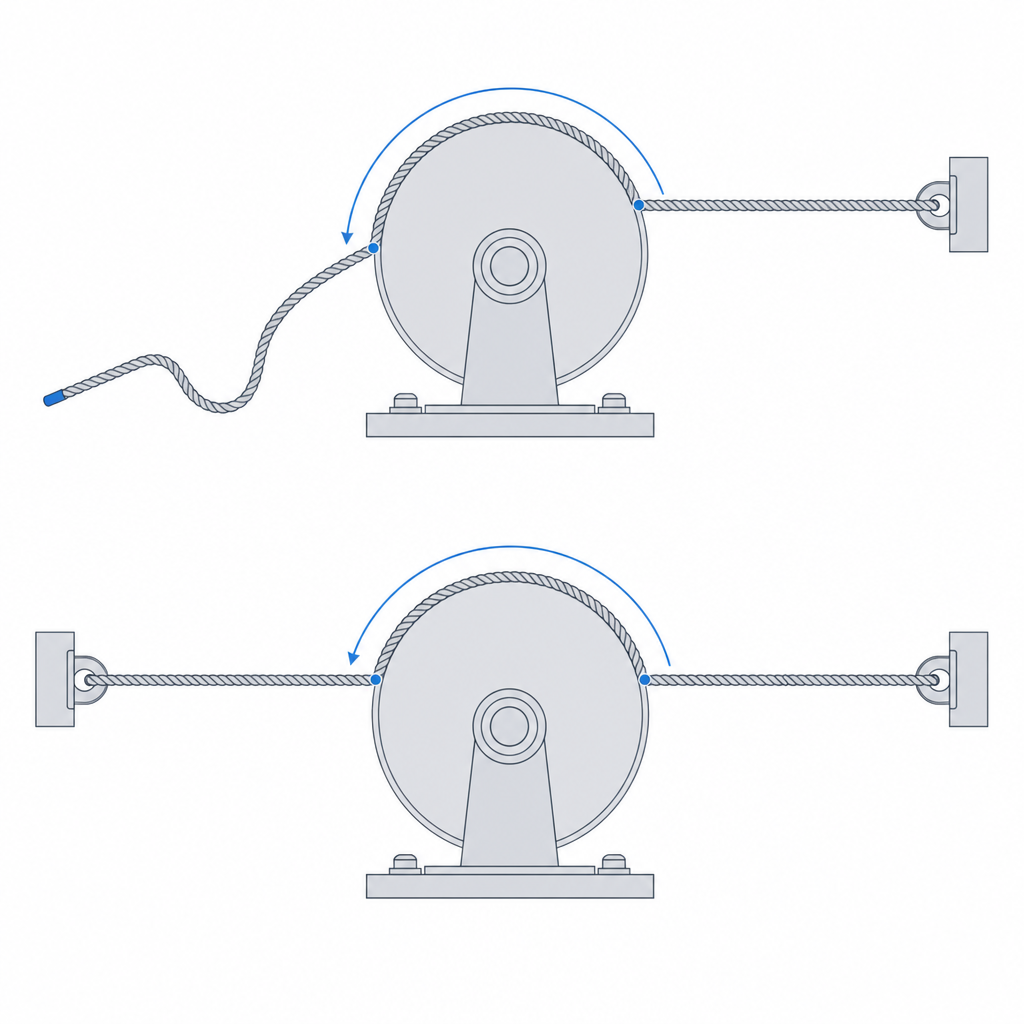
Pretensa los dos ramales o aparecerá una zona muerta
Un cabrestante mueve la carga en los dos sentidos tirando, alternativamente, de uno u otro ramal del cable. El problema aparece en el ramal que en cada momento no tira: si queda flojo, el sistema tiene holgura otra vez: una zona muerta en la que el tambor gira un poco antes de que el ramal de retorno se tense y la salida empiece a moverse. Y entonces has perdido justo lo que fuiste a buscar al cabrestante, la ausencia de backlash.
La cura es el pretensado. El cable se monta con una tensión inicial deliberada de modo que los dos ramales estén siempre tirantes, aunque ninguno esté trabajando bajo carga. Así, cuando el tambor invierte el sentido, el ramal que toma el relevo ya estaba tenso y la salida responde de inmediato, sin ese hueco muerto. Lo consigues con un muelle en serie con uno de los extremos —que absorbe el estiramiento del cable y las pequeñas variaciones de longitud manteniendo la tensión— o con un tornillo tensor que acerca un anclaje y aprieta el cable hasta el punto justo. El muelle es más tolerante: el cable trenzado cede algo con el uso y se destensa despacio, y un muelle recupera esa pérdida por sí solo, mientras que un tornillo te obliga a reapretar de vez en cuando.
No te pases pretensando. Una tensión inicial excesiva no compra más rigidez útil: solo carga permanentemente el cable, el tambor y los rodamientos, acelera el desgaste de la pista y, en una pieza impresa, mete una solicitación sostenida que el plástico va a relajar despacio con el tiempo —y ese relajamiento te roba el pretensado justo donde lo necesitas estable. Tensa lo justo para que el ramal flojo no llegue nunca a aflojar del todo en el peor caso de carga, y déjalo ahí.
Los modos de fallo y el material que los frena
Un cabrestante impreso falla de varias maneras, y conviene reconocerlas por separado porque cada una pide un arreglo distinto.
El primero es el cable que se monta y se atasca. Casi siempre es falta de guiado: ranura helicoidal ausente, de paso equivocado o impresa tan basta que no contiene las vueltas. La vuelta se sale de su canal, se sube encima de la contigua, los tramos se pisan y el movimiento se bloquea. Se cura en la geometría del tambor, con una hélice de paso correcto y paredes de canal limpias —de ahí la insistencia en imprimir el tambor de eje vertical.
El segundo es el deslizamiento del bobinado. Ojo, no es lo mismo que el patinaje de un cabrestante de fricción: con el cable anclado por los dos extremos, el conjunto no deja de transmitir par bajo carga normal. El deslizamiento aparece cuando las vueltas son demasiado pocas para descargar el anclaje durante el bobinado, o cuando la pista se ha vidriado —con el uso, el roce pule la superficie de la ranura y baja el rozamiento entre cable y tambor justo donde lo necesitas para que las vueltas agarren mientras el anclaje toma el relevo. La primera causa se arregla dando más vueltas. La segunda no tiene arreglo en sitio: no puedes lijar el fondo de una rosca de paso milimétrico ya montada, así que toca reimprimir la pieza o rediseñar a un material que conserve mejor la textura.
El tercero es el desgaste o el corte del cable. Una arista viva en el borde de la ranura impresa actúa como un filo, y el cable trabaja contra ella en cada ciclo. En cable de acero el fallo dominante es la fatiga por flexión: el alambre se dobla millones de veces sobre el mismo punto y un hilo cede, luego otro, hasta que falla. En Dyneema o UHMWPE —el estándar de facto en robótica fina, porque casi no fatiga al flexionarse— el dominante es la abrasión: el filo va serrando las fibras. En los dos casos el remedio es el mismo. El depósito capa a capa del FDM tiende a dejar bordes escalonados y agudos, así que redondea los bordes y el fondo de la ranura: un radio en el fondo del canal mayor o igual que el radio del cable reparte la presión de contacto y elimina el filo. Es el mismo principio que evita que una esquina viva concentre tensión en cualquier pieza cargada, aplicado aquí a un elemento que pasa millones de ciclos rozando.
Decidir el paso de la hélice, la holgura del canal y el ajuste de los anclajes es, al final, el mismo trabajo de calibración que cualquier otra unión impresa: sale de medir tu máquina, no de copiar una tabla. Tolerancias para piezas que se mueven te lleva de la función al hueco, y ese número, el hueco real de tu boquilla y tu material, es el que hace que el cable asiente en su canal sin forzar y sin saltar.