Wrap-spring clutch: grips or releases depending on direction
One mechanism holds enormous torque with almost no material, yet most people don't recognize it when it's right in front of them: a helical spring wound around two drums. Turn it one way and the spring bites: the two drums turn as one and transmit all the torque. Turn it the other way and the spring slips — the drums ignore each other and nothing happens. No teeth, no ratchet, no click — just a wire that tightens or loosens depending on which way you move it. This is the wrap-spring clutch, and understanding why it grips so hard one way and releases so cleanly the other comes down to a single physical phenomenon, one you'll reuse in half a dozen mechanisms.
The capstan effect: where the directional grip comes from
The heart of the mechanism is the same trick a sailor uses to hold a loaded line by taking a couple of turns around a winch: the friction of a band wound over a cylinder grows with the wrap angle. The spring is that band, the drums are the cylinder, and here it's wound continuously over several turns, wrapping them from the outside. (There's an inverted variant — a spring that expands against the inside of a hollow hub — but everything that follows describes the external wrap, which is the one that makes sense to print.)
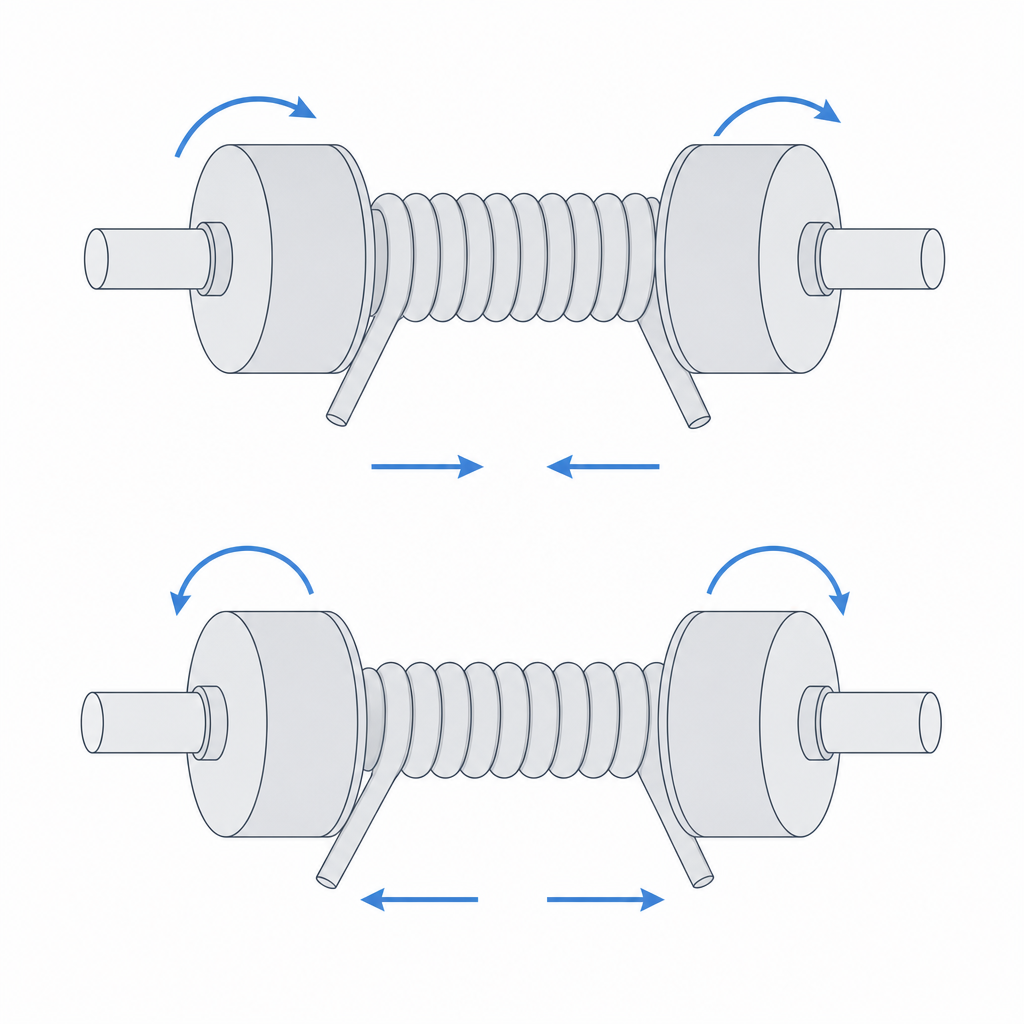
Watch what happens in each direction. The spring is wound into a helix with a specific hand, like a thread. When the input drum turns in the direction that tends to close the coils, each turn of the wire pulls the next one tighter against the drum. The friction of one coil increases the tension that reaches the next, which clamps harder, which increases the tension again... and so on coil after coil. The spring contracts onto the drums and hugs them: it bites. The instant you reverse the rotation, the torque tends to open the coils. Now each turn loosens the next instead of tightening it. The spring's inner diameter grows by a few microns, the contact relaxes, and the wire slips over the drum. The same spring, the same friction, opposite behavior depending on which way it turns. That's a directional coupling — achieved without a single part that meshes.
The practical consequence of the spring wrapping two drums — the input and the output, aligned end to end under the same wrap — is that the grip doesn't just brake — it transmits. When the coils close, the two hubs are locked together by friction and the torque passes from one to the other. When they open, each hub turns on its own.
Self-energizing and the control tang
It's worth separating two effects that are easy to confuse, because the capstan explains one of them and not the other.
The torque the clutch transmits when it bites is set by the radial preload: the spring is forced slightly open when assembled onto the drums, and that interference is what clamps the wall against the hub. The grip torque scales with that contact pressure, with the area the spring wraps, and with the friction coefficient — not with an exponential ratio of line tensions. That's why the real limit of what a wrap clutch holds is set by the preload, not by the number of turns: three or four well-seated coils already grip all the useful contact, and adding wire barely adds anything.
Where the capstan does rule is in the control — and there the exponential works in your favor. It's the Euler–Eytelwein equation — the capstan equation: the force at one end of an anchored band is amplified by e raised to the product of the friction coefficient and the wrap angle. If you let one end of the spring finish in a tang that sticks out — a control tang — and you hold it, you stop the first coil from contracting. And this is the key: thanks to that exponential, a small force on the tang overcomes all the grip the spring exerts downstream. Loosening a single coil breaks the self-amplification chain: the spring stops biting and disengages on command, even if the direction of rotation was the gripping one. This is the principle of the controlled wrap-spring clutch found in so many office and automotive mechanisms: you don't fight all the spring's grip, you just release the first turn and the exponential does the rest.
Anchor one end or you'll just have a brake
For the spring to transmit torque from input to output — and not merely brake both against ground — usually one end is anchored to the input drum, in a slot or hooked over a post. That anchor is what drags the spring along when the input turns in the closing direction: the input pulls on the anchored end, the spring winds tighter, and it engages on the output. Without an anchor, an external spring can bite, but it has no clean way to receive the input torque.
That means one thing for the printed part: you have to model the anchor slot in the input drum, sized to the wire diameter and with enough material around it so the post doesn't delaminate and tear out when the spring pulls on it. The free end — the control-tang end, if you use one — faces the output drum. Mixing up which end is anchored and which is free is an assembly mistake you pay for with a clutch that brakes when it should transmit.
When to choose it over a ratchet
The wrap-spring clutch competes with the ratchet and the self-locking worm for the same job: letting motion through one way and blocking it the other. What sets it apart is that it engages continuously, with no discrete steps.
A ratchet grips by teeth: it only locks at the positions where a tooth drops into its gap, so it has an angular play of at least one tooth pitch before it bites, and it bites with an audible click and a small step. The wrap spring has no teeth and no steps: it grips at exactly the angle where you reverse the torque, with no backlash and no noise. That makes it the natural choice when you want a silent no-back — a brake that holds a load without clattering every time a tooth yields — a smooth one-way clutch, or a low-vibration indexer where the ratchet's click would be a defect, not a virtue. The trade-off is that the ratchet locks positively, mechanically, while the spring locks by friction: if you exceed its grip torque, it slips instead of snapping. Sometimes that's exactly what you want — a built-in torque limit — and sometimes it's the reason to go back to teeth.
Print the drums, embed the spring
This is where FDM lays down its rules. The temptation to print the whole spring in plastic is understandable, but it's almost always a mistake: a printed helical spring loses its force to creep, and fast. The wire lives permanently pretensioned, hugging the drums, and a thermoplastic under sustained load flows slowly and relaxes that tension until the spring stops biting with the force you calculated — and PLA is the worst offender. Within a few weeks, or sooner if it runs warm, your clutch slips. That's why the wrap spring is the textbook example for embedded hardware: use a real metal spring and design the printed part around it. The detail of how to captivate metal components inside a printed part is in Embedded hardware: magnets, bearings, and inserts.
The realistic approach, moreover, isn't to commission a custom spring — wrap springs aren't a trivial catalog item — but the reverse: start from a stock spring, with its commercial inner diameter and hand, and size the drums to that spring. The drum's outer diameter comes from the spring's inner diameter plus whatever preload interference you want, not from a number you pick blind.
What you do print are the drums, and there the finish is everything, because the grip depends on a uniform contact between the spring and the hub surface. Two requirements dominate. The first is a consistent, well-finished diameter: the two drums, input and output, must have the same outer diameter and be aligned end to end, because the spring bridges the joint between them and any step or misalignment leaves coils only partly seated, right where you want them to clamp. Print them vertically so the contour comes out as cylindrical as possible — a cylinder laid on its side comes out oval, its roundness degraded by the overhangs — and expect them to print a little narrower than nominal.
That vertical orientation carries a cost worth knowing. The layer lines end up horizontal, perpendicular to the radial load the spring exerts on the track — and between layers is exactly the weak direction: the friction surface starts out with a slightly grooved profile and with delamination planes right where the spring clamps. Roundness improves, but the track wears out sooner. Compensate with a thick wall and several perimeters in the hub, and if the clutch is going to cycle a lot, consider a metal sleeve on the friction track — the same embedded hardware you already use for the spring, now applied to the contact surface.
The second requirement is rotational clearance between the hubs and their support: the assembly has to turn free when the spring releases, so the shaft and its bearings are sized like any sliding pivot, with the per-side clearance your calibration gave you, and the full reasoning is in Tolerances for moving parts.
Failure modes and how to recognize them
When a printed wrap-spring clutch doesn't work, it's almost always one of these four failures, and each has a clear signature.
The first is insufficient torque: the spring-drum preload has come out loose and the spring slips in the gripping direction instead of biting. You recognize it because the clutch slips in both directions, not just the release one. The usual cause in FDM is a drum that came out narrower than planned and killed the preload; the fix is to enlarge the drum or tighten the spring, not to over-clamp on guesswork.
The second is the opposite, residual drag torque: the preload is so high that, when you reverse, the spring expands only partway and leaves a residual drag — hard to overcome, and enough to carry the output along when it should be free. It's not a geometric stop that prevents opening — the spring can always expand — it's excess interference; the fix is to reduce the spring-drum interference, not to touch the shaft bearing.
The third is wear of the drum surface: printed plastic is soft against steel wire, and the repeated friction of the coils polishes, scores, and eventually grooves the hub, which loses grip with the cycles — it's the weak point of any printed friction surface, and the reason not to expect a PLA drum to last as long as a metal one.
The fourth only shows up if you ignored the earlier advice and the spring is plastic: creep relaxes the force over time and the grip fades even when everything else is right.
| Symptom | Likely cause | What to change |
|---|---|---|
| Slips in both directions | Loose spring-drum preload | Larger drum or tighter spring |
| Drags on release / hard to free | Excess preload, high drag torque | Reduce the spring-drum interference |
| Grip that fades with use | Wear of the hub track | A harder drum material or a metal sleeve |
| Grip that fades over time at rest | Creep of the plastic spring | Replace with an embedded metal spring |
The line that separates "slips" from "drags" is narrow and comes down to tenths of a millimeter of drum diameter, so don't guess it: measure it. Print the drum, measure its real diameter with a caliper, and pick or adjust the spring to that figure. The same coupon method you use for any sliding fit works here too to find the preload that bites without dragging, and the reasoning for why a printed hole and shaft never come out at nominal is in Tolerances for moving parts.